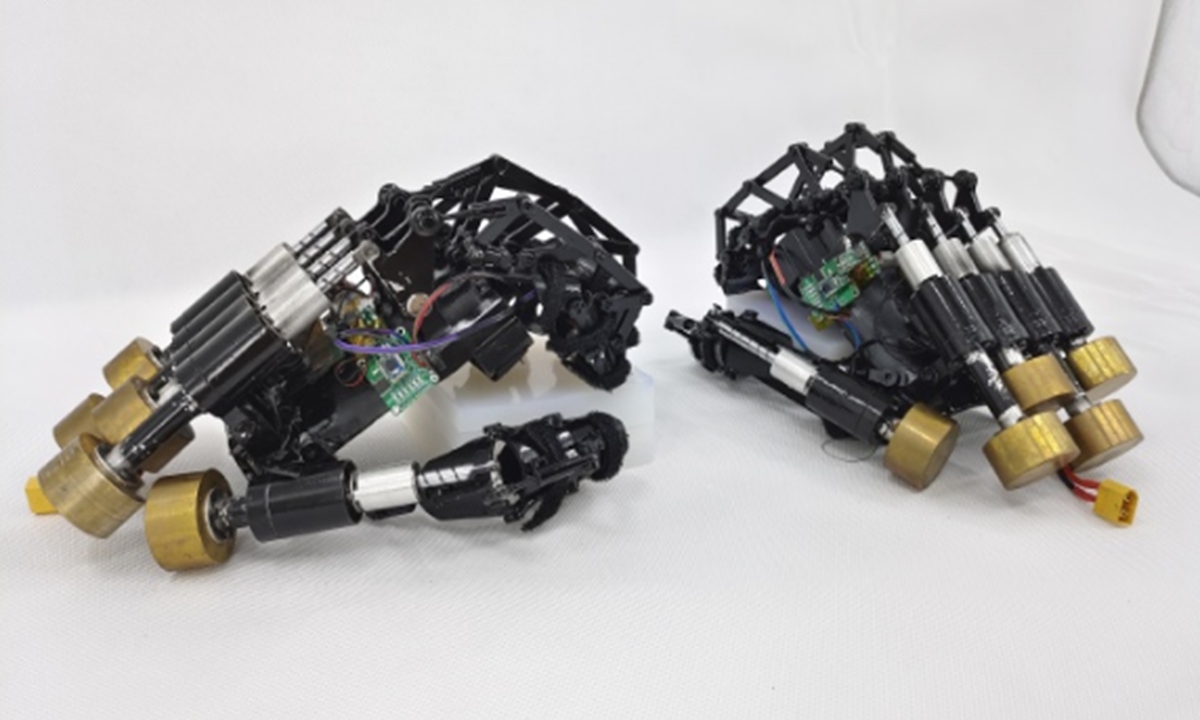
Nonmotorized robotic hand exoskeletons developed by research team led by Sun Shuaishuai, a professor with the University of Science and Technology of China Photo: China Science Daily
Chinese researchers have recently presented the world a set of nonmotorized robotic hand exoskeletons that would address the hand’s strength limitations and fatigue during physically demanding tasks, allowing users to lift slate slabs weighing more than 200 kilograms with ease.
According to China Science Daily, the nonmotorized robotic hand exoskeletons were jointly developed by the research team led by Sun Shuaishuai, a professor with the University of Science and Technology of China. And per the relevant research results published in IEEE Transactions on Robotics, the hand exoskeleton is based on “magnetorheological (MR) actuators to provide high gripping support and elevate grip endurance.” And it adopts a very different solution from most existing hand exoskeletons, which are “motorized, being weak in generating high supporting force for gripping augmentation,” read the paper.
Such nonmotorized robotic hand exoskeletons highlight the exoskeleton’s vast application potential, as it is presented in the paper “in rescuing scenarios such as post-earthquake rescue, debris clearance, and casualty evacuation, our exoskeleton effectively supports gripping and improves working efficiency.”
In earthquake rescue operations, the complex on-site environment often prevents most equipment from being deployed, leaving erescuers to rely largely on manual labor to clear heavy debris. Consequently, the research team also conducted simulated earthquake rescue application experiments. During tasks involving rescuing trapped individuals and transporting the injured, the amplitude of electromyographic (EMG) signals from the subjects’ flexor digitorum muscles (muscles that control finger flexion) was significantly reduced, indicating a substantial decrease in the activity of the muscles responsible for finger grip. In the task of transporting the injured, compared to when they did not wear the exoskeleton gloves, the subjects’ respiratory rate decreased by an average of 20 percent, while the maximum transport distance increased by 110 percent, according to Mai Xianlong, a doctoral student at USTC and first author of the paper.
Sun added that “apart from the said scenarios, we can leverage the damping properties of magnetorheological materials to design hand and arm exoskeletons capable of providing force feedback. Simultaneously, by integrating joint motion capture, we can realize the teleoperation of remote robotic arms and manipulators — while delivering real force feedback — for deep space exploration missions.”
The MR actuator achieved a peak holding force of 1046 N with merely 5 W power input, boasting a force-to-power ratio one-order-of-magnitude higher than conventional approaches, and 97.7 percent energy reduction for the same holding force compared to other approaches, read the paper.
Participants wearing the hand exoskeletons experienced a 41.8 percent enhancement in grip strength without external power and reduced hand muscle fatigue during extended physical tasks, it said.
Sun said the research team’s next step is to further enhance the functionality of the hand exoskeleton system.
“For example, we will integrate human intention recognition to more accurately adjust the exoskeleton’s output based on the wearer’s intent; improve the exoskeleton’s structure by leveraging composite materials and 3D printing technology to reduce weight while increasing structural strength; and refine the human-machine interaction design to enable the exoskeleton to achieve most of the degrees of freedom of human hand movement, thereby reducing slippage and discomfort between the exoskeleton and the human hand,” Sun said.
Global Times