Intelligent Transportation Systems increasingly rely on interconnected networks and data to improve traffic flow and safety, but this integration creates new vulnerabilities to cyberattacks that threaten critical infrastructure. Minhaj Uddin Ahmad, Akid Abrar, Sagar Dasgupta, and Mizanur Rahman, all from the University of Alabama, address this challenge by developing a comprehensive co-simulation testbed for cybersecurity research. Their innovative platform links detailed simulations of driving environments, traffic patterns, and vehicle-to-everything communication, enabling researchers to thoroughly assess and strengthen the security of these complex systems. This achievement provides a cost-effective and repeatable method for identifying vulnerabilities and testing mitigation strategies, ultimately paving the way for more secure, efficient, and resilient transportation infrastructure.
OpenCAMS platform for connected mobility research
Researchers have developed OpenCAMS, an open-source co-simulation platform to advance research in connected and automated mobility (CAM) systems. This comprehensive platform addresses the need for realistic and flexible environments to test and evaluate these complex systems, including vital security aspects, before real-world deployment. A key focus is incorporating post-quantum cryptography to prepare for future security threats posed by advancements in computing technology, providing a valuable tool for understanding and mitigating risks in increasingly connected transportation networks. CAM systems involve intricate interactions between vehicles, infrastructure, and communication networks, making real-world testing expensive and difficult to scale.
Co-simulation combines different simulation tools, such as those modelling traffic flow, network behaviour, and vehicle dynamics, to create a more holistic and realistic environment. An open-source approach fosters collaboration, transparency, and reproducibility of research findings, accelerating innovation in the field. OpenCAMS integrates SUMO, a detailed traffic simulator known for its accurate modelling of vehicle behaviour and traffic flow, and OMNeT++, which serves as the network simulator, providing a framework for modelling communication networks and protocols. Veins is used to specifically simulate vehicular networks, while the platform is designed to integrate with vehicle dynamics simulators like CARLA and AirSim, allowing for comprehensive modelling of vehicle behaviour.
The platform primarily investigates C-V2X (Cellular Vehicle-to-Everything) communication, supporting modelling of vehicle-to-vehicle, vehicle-to-infrastructure, and vehicle-to-network communication. The platform’s modular architecture allows researchers to easily customize and extend its functionality. Different simulation tools are coupled bidirectionally, creating a more realistic and interactive simulation environment. OpenCAMS provides tools for defining and managing complex traffic scenarios, including vehicle trajectories, network configurations, and security threats, and collects a wealth of data during simulations, enabling analysis of CAM system performance and identification of potential vulnerabilities.
Quantum computers pose a significant threat to current cryptographic algorithms used in C-V2X communications. OpenCAMS incorporates PQC algorithms, specifically Falcon, to evaluate the performance and security of C-V2X communications against these quantum attacks. Researchers evaluate Falcon in terms of signature generation and verification time, signature size, and communication overhead, while also analysing its security against various attacks, including those leveraging quantum computing. OpenCAMS is positioned as a more comprehensive and flexible platform compared to other existing co-simulation tools.
The platform is validated using real-world traffic data and network traces, and evaluated in realistic scenarios, including highway driving, urban intersections, and emergency situations, ensuring it accurately reflects real-world conditions and provides reliable results. The primary contribution of this work is the development of an open-source co-simulation platform for CAM research. The integration of PQC algorithms addresses a critical security challenge, and the modular architecture allows for easy customization and extension. Future work includes improving the accuracy and realism of simulation models, supporting more advanced communication technologies, developing more sophisticated security analysis tools, integrating with more vehicle dynamics simulators, and expanding the range of simulated scenarios. They successfully linked these simulators to model complex traffic scenarios and assess the impact of security measures on communication and system performance. A case study focused on a cooperative intelligent transportation system, specifically a proactive safety alert system enhanced with post-quantum cryptography, illustrating the testbed’s capabilities in a realistic setting. The evaluation revealed that implementing post-quantum signatures introduced minimal overhead, with signature generation and verification times measured in milliseconds.
OpenCAMS, A Co-Simulation Platform for Connected Vehicles
Researchers have developed OpenCAMS, a generalized and time-synchronized co-simulation platform integrating SUMO for scalable traffic modelling, CARLA for high-fidelity environmental perception and vehicle dynamics, and OMNeT++ for flexible C-V2X communication simulation. This platform enables exploration of the interplay between large-scale traffic dynamics, detailed vehicle perception, and real-time communication within a single environment, addressing limitations found in existing frameworks. OpenCAMS employs a multi-client TraCI loop with strict time-step synchronization to ensure consistent operation between simulators. The platform supports the simulation of signal spoofing, message tampering, and denial-of-service attacks, allowing researchers to assess vulnerabilities and test mitigation strategies.
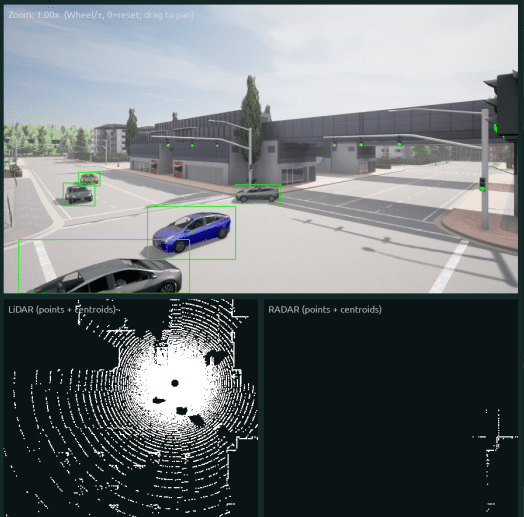
By integrating these three distinct simulators, OpenCAMS overcomes limitations found in existing frameworks that often narrowly focus on specific application domains or lack comprehensive communication support. The platform’s modular design allows for the integration of emerging technologies and threat models, making it a valuable tool for developing robust mitigation strategies. Researchers successfully demonstrated the platform’s capabilities by simulating complex cyber-attack scenarios and evaluating the effectiveness of various countermeasures. This system links CARLA, SUMO, and OMNeT++ to model complex interactions across multiple domains, addressing the limitations of single simulators which often lack the depth to accurately represent all ITS components. The testbed creates detailed 3D environments and models sensor behaviour, simulating realistic perception data from LiDAR, cameras, and radar with configurable environmental conditions and deterministic time-stepping. To model vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication, scientists harnessed OMNeT++, extending its capabilities to support vehicular communication standards including DSRC, LTE, and C-V2X technologies.
This co-simulation approach allows researchers to evaluate end-to-end system performance, identifying vulnerabilities and benchmarking mitigation strategies in a unified experimental environment. The team implemented a case study focusing on a C-V2X proactive safety alert system enhanced with post-quantum cryptography, demonstrating the testbed’s ability to assess the security and resilience of advanced ITS infrastructure. Researchers utilized the TraCI interface within SUMO to facilitate communication and data exchange between the simulators, ensuring synchronized operation and accurate representation of real-world conditions.
👉 More information
🗞 End-to-End Co-Simulation Testbed for Cybersecurity Research and Development in Intelligent Transportation Systems
🧠 ArXiv: https://arxiv.org/abs/2509.16489