17/07/2025
112 views
3 likes
For the exploration of planetary bodies with low gravity, such as the Moon or Mars, legged robots have an advantage over traditional rovers. One such robot recently jumped from wall to wall in conditions simulating partial microgravity and free flight at the European Space Agency’s Orbital Robotic Laboratory.
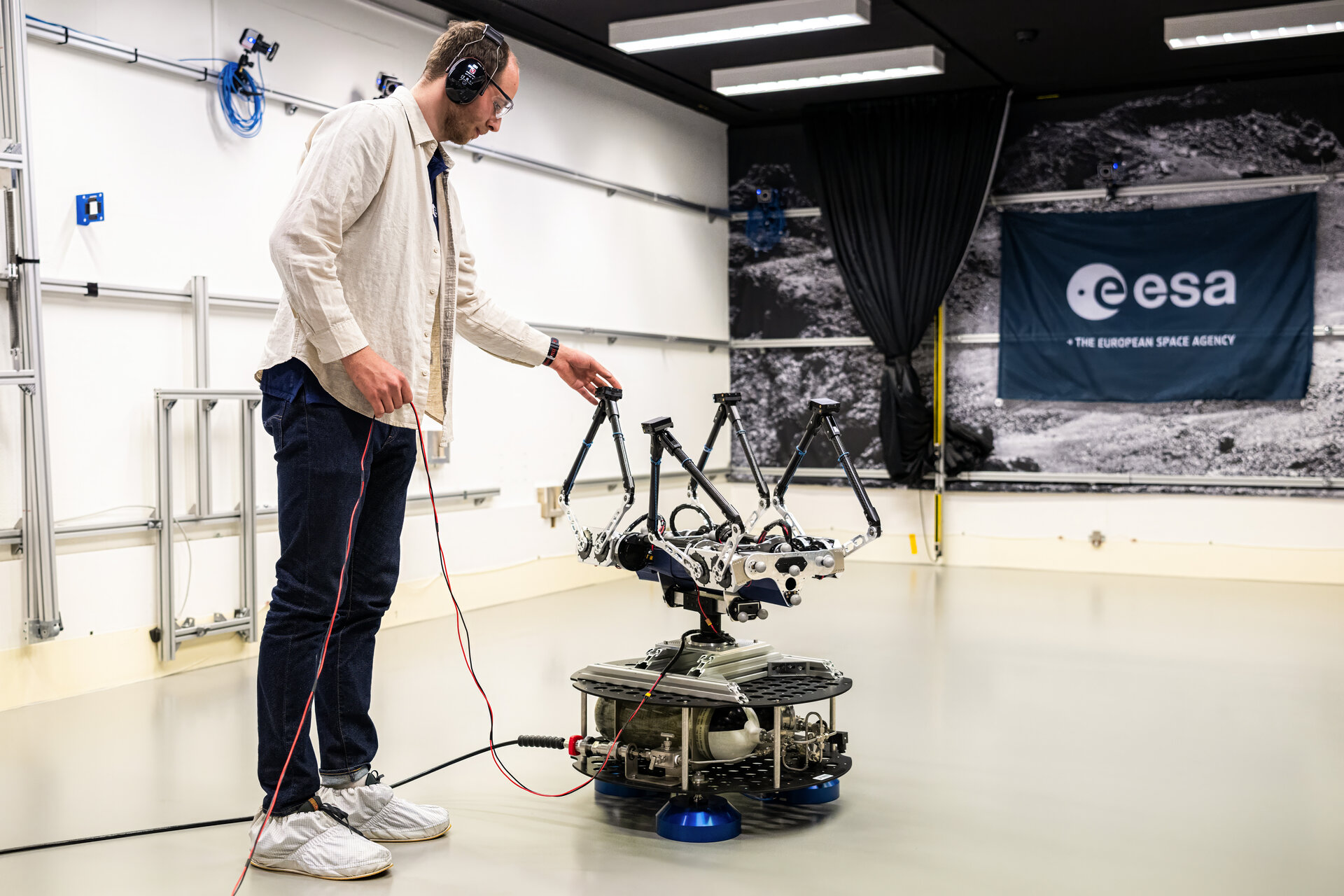
Meet Olympus, a four-legged robot developed and built by Jørgen Anker Olsen, visiting PhD researcher from the Norwegian University of Science and Technology.
When on ground, the robot moves around using its four ‘double’ legs – each one consists of two limbs with a bending joint, connected at the bottom in a paw-like patch.
“One of the potential applications of robots like Olympus is the exploration of Mars,” explains Jørgen. “They could easily move around the planet’s surface, as well as venture beneath it, for example into the martian lava rubes – volcanic caverns that would be too high-risk for flying probes, like drones, to explore.
“In addition, legged robots can jump over obstacles that would be too challenging for robots moving on wheels or tracks. In lower gravity, their jumping ability becomes an even bigger advantage, allowing them to jump much higher than they would on Earth.”
This means that when moving around to explore a low-gravity planet or the Moon, legged robots could jump around similarly to astronauts during a lunar landing.
Mounted upside down to a floating platform at ESA’s ORBIT facility, Olympus gets to experience simulated microgravity in two dimensions, allowing Jørgen to better understand how the robot would move under conditions it was created for: the gravity on Mars, which is about 2.5 times weaker than Earth’s gravity.
The ORBIT facility is part of ESA’s Orbital Robotic Laboratory (ORL) located at ESTEC, the agency’s technical heart in the Netherlands. It consists of a 43 m2 ultra-flat floor – the height difference between its lowest and highest points is less than a millimetre.
The facility operates similarly to an air hockey table – its testing platforms are equipped with air bearings, which create a stable air gap between the platforms and the floor.
This air gap, thinner than a strand of hair and so hardly visible to the human eye, allows the platforms to move across the floor without any friction, reproducing the state of weightless free-floating in two dimensions.
“The algorithm that makes Olympus move is trained using reinforcement learning – a machine learning method that works on the basis of trial and error. This means the robot controls its orientation autonomously,” Jørgen adds.
When the platform rotates to face one direction, the robot tries to right itself with a swimming-like motion, using a technique it has identifies as the best one during simulations. “This configuration, with Olympus attached to one of ORBIT’s floating platforms, allows us to test the legs’ full range of motion. During one of the testing setups, Olympus was even able to move from wall to wall, reorienting itself after each jump to always land on all four ‘feet’.”
Jules Noirant of ESA’s Orbital Robotics Laboratory comments: “Jørgen’s stay at the ORL highlights the versatility of our testing facilities and their ability to support robotic exploration. Our activities range from locomotion controllers in a planetary environment to jumps and stabilisation techniques in microgravity. We are always pleased to host PhD candidates as visiting researchers to validate their work in a relevant environment, creating a valuable outcome for their thesis.”