Skateboarding legend Tony Hawk added an unexpected twist to a holiday classic, making a surprise onstage appearance in The Nutcracker.
Hawk joined the Golden State Ballet’s production in San Diego, California, rolling across the stage during a…

Skateboarding legend Tony Hawk added an unexpected twist to a holiday classic, making a surprise onstage appearance in The Nutcracker.
Hawk joined the Golden State Ballet’s production in San Diego, California, rolling across the stage during a…

The Ministry of Health, through the Public Health Institute (ISP), reports the detection of influenza A(H3N2) subclade K in samples analyzed in the country. This finding was expected given the global epidemiological behavior of the virus and…
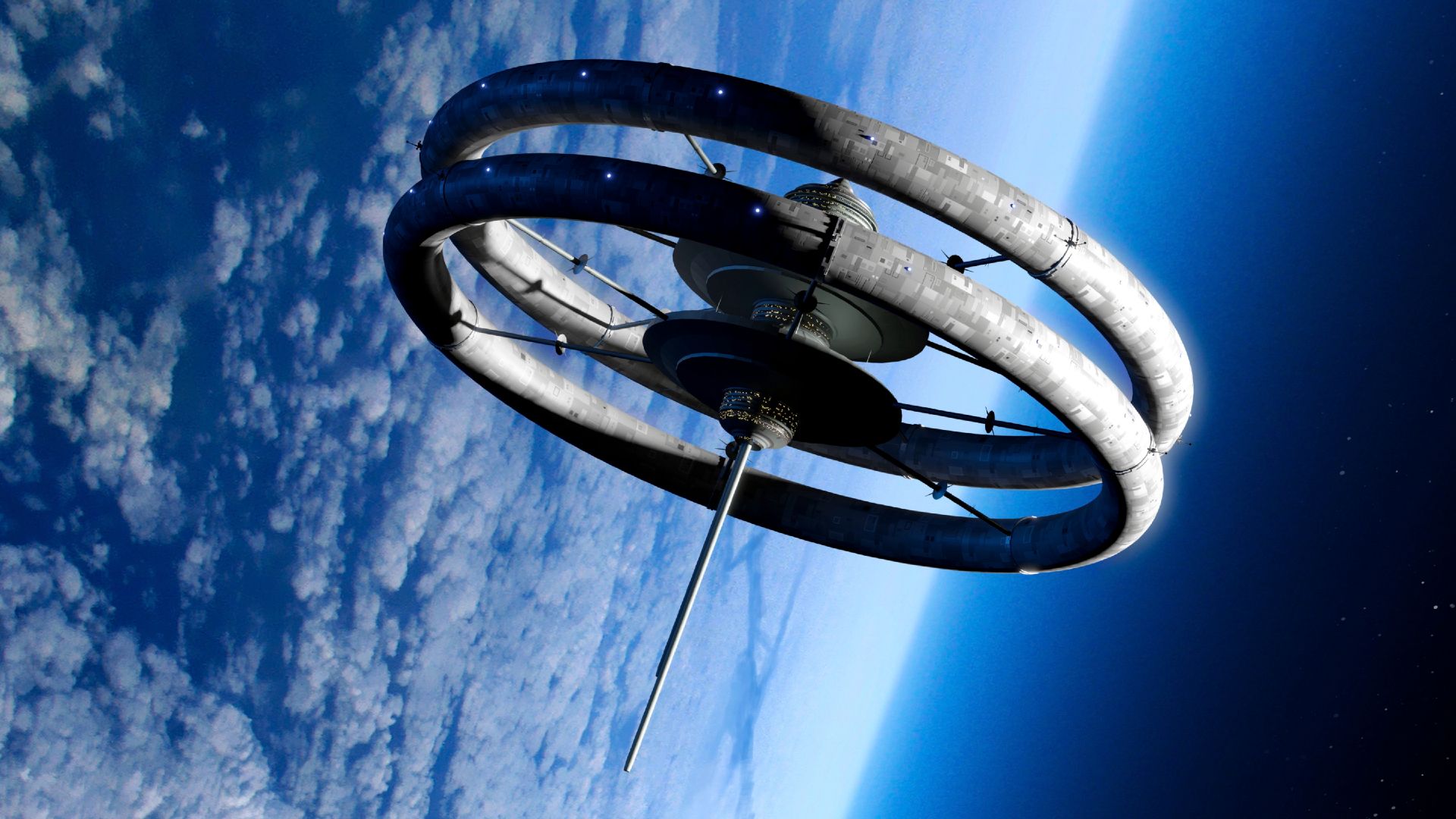
Russian state-owned Energia rocket company has secured a patent for a novel spacecraft architecture designed to generate artificial gravity, a capability which could provide a huge boost for long-duration crewed missions.
A report from Russian…

Cars aren’t merely vehicles. They’re rolling testimonials of taste and income. Movie cars have even bigger roles, often upstaging the human actors they’re chained to….

The Trump administration is recalling dozens of career Ambassadors, saying the president wants diplomats who will advance his agenda. That’s what foreign service officers sign up for.
AILSA…
Generated by cloudfront (CloudFront) Request ID: gNY9Bvo5Fbj3jg4njp5QH1v4atuRAteD77fG5fmjhu89gx5ujnzMBQ==
Disclaimer: Early release articles are not considered as final versions. Any changes will be reflected in the online version in the month the article is officially released.
Author affiliation: Centro de Investigación en…
Disclaimer: Early release articles are not considered as final versions. Any changes will be reflected in the online version in the month the article is officially released.
Author affiliation: University of Toulouse, Toulouse,…
Disclaimer: Early release articles are not considered as final versions. Any changes will be reflected in the online version in the month the article is officially released.
Author affiliation: McMaster University, Hamilton,…
Disclaimer: Early release articles are not considered as final versions. Any changes will be reflected in the online version in the month the article is officially released.
Author affiliation: Centers for Disease Control and…