[Barcelona, Spain, March 2, 2026] Huawei launched its AN L4 Phase 2 solution today at the Autonomous Networks Summit co-hosted with TM Forum as part of this year’s MWC Barcelona 2026 activities. The event, themed “Collaborating to Accelerate AN L4 Deployment at Scale” was attended by executives from leading telecom carriers, including China Mobile, Deutsche Telekom, Telefónica, and Orange, who discussed how the large-scale commercial adoption of autonomous networks will inject new momentum into intelligent transformation across the industry.
The AN industry identified high-value L4 scenarios and an implementation blueprint in 2025, and more breakthroughs in large-scale deployment are expected to be made in 2026. The commercial AN L4 Phase 2 solution is being launched to address bottlenecks in large-scale deployment, such as cross-domain integration and cross-scenario coordination. Huawei’s new solution makes breakthroughs in three areas.
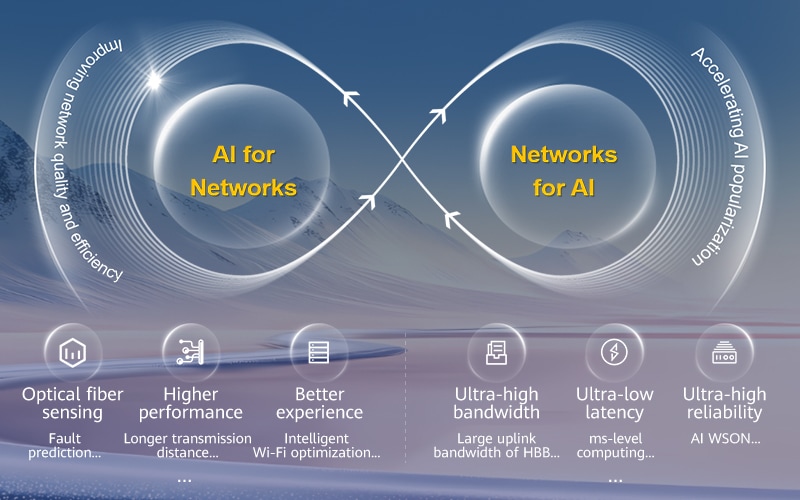
Foundational network element (NE) awareness for network autonomy: At the NE layer, the solution has enhanced millisecond-level awareness and decision-making capabilities to provide stable and reliable data and execution support for complex collaboration.
AI agent collaboration for domain-specific autonomy: At the network layer, the solution creates domain-specific network agents to coordinate and plan tasks in different scenarios across the domain, such as fault management, energy efficiency optimization, and experience assurance. This enables the evolution from scenario-specific automation to network autonomy.
A2A-T protocol for cross-layer, cross-domain integration: To support complex agent collaboration across the network layer, services layer, and even different equipment suppliers, the solution has introduced A2A-T, the world’s first carrier-grade AI agent communication protocol. Huawei and China Mobile also announced an A2A-T open-source software program to accelerate the protocol’s global adoption and application.
At the summit, a number of AN industry players shared their own best practices, and China Mobile also launched new AN L4 innovations. The launch was attended by representatives from several companies that supported these innovation projects, among them Cao Ming, Huawei’s ICT BG COO and CIO.
Cao Ming from Huawei at China Mobile’s AN L4 innovation launch
A recommitment ceremony titled “Accelerating Large-Scale AN L4 Deployment” was also held at the summit, with industry leaders including TM Forum, China Mobile, Orange, Telefónica, Huawei, Infovista and Inspur reaffirming their commitment to accelerating the implementation of the AN L4 industry blueprint and driving a transition for AN L4 from innovation pilots to global commercial adoption.

Ken Lu, President of Huawei’s General Development Department at the ceremony for accelerating the large-scale commercial adoption of AN L4
Huawei believes that the large-scale commercial adoption of AN L4 will be key to intelligent upgrade across industry, so the company plans to continue working with industry partners to achieve this goal faster and move towards an era of agentic networks.
MWC Barcelona 2026 will be held from March 2 to March 5 in Barcelona, Spain. During the event, Huawei will showcase its latest products and solutions at stand 1H50 in Fira Gran Via Hall 1.
The era of agentic networks is now approaching fast, and the commercial adoption of 5G-A at scale is gaining speed. Huawei is actively working with carriers and partners around the world to unleash the full potential of 5G-A and pave the way for the evolution to 6G. We are also creating AI-Centric Network solutions to enable intelligent services, networks, and network elements (NEs), speeding up the large-scale deployment of level-4 autonomous networks (AN L4), and using AI to upgrade our core business. Together with other industry players, we will create leading value-driven networks and AI computing backbones for a fully intelligent future.
For more information, please visit: https://carrier.huawei.com/en/minisite/events/mwc2026/