SAN BRUNO, Calif. — The self-driving car company Waymo said Wednesday it would begin offering rides on freeways for robotaxi customers in Los Angeles, Phoenix and the San Francisco Bay Area in a significant step forward for autonomous vehicles.
Previously, Waymo has limited its robotaxis to city streets, saying it wanted to be sure its technology was safe before deploying it at the faster speeds of freeways. But after years of testing, the company said it now believed it was ready.
The ability to travel on interstate highways and expressways has been one of the missing puzzle pieces for self-driving technology since scientists began working on it decades ago, alongside such challenges as snowy weather and vandalism.
“This has been a long time in the making,” Waymo co-CEO Dmitri Dolgov said in a briefing with reporters.
“Freeway driving is one of those things that’s very easy to learn but very hard to master when we’re talking about full autonomy without a human driver as a backup, and at scale. So, it took time to do it properly,” he said.
Waymo, a spinoff of Google, appears to be the first company to offer fully autonomous freeway rides, without a human specialist in the car, to fare-paying riders in the United States, company spokesperson Sandy Karp said.
Wendy Ju, an associate professor of information science and design tech at Cornell University, said that freeways are a more controlled environment in some respects — fewer pedestrians, for example — but also riskier in other ways than city streets.
“The higher speed does pose a much higher risk,” she said. “In order to predict what’s going to happen 10 seconds from now, the car has to sense what’s happening much farther down the road.”
Ju, who has worked as a consultant in the past for autonomous vehicle companies but not for Waymo, said she has “guarded optimism” about the safety of the company’s technology.
In a 40-minute test ride with an NBC News reporter last week, a Waymo robotaxi traveled up and down freeways in Northern California without incident: merging on and off, obeying the speed limit, following at a safe distance and handling congestion slowdowns. At one point, it avoided a human driver who tried to cross a solid white line at an exit ramp.
The competition to deliver robotaxi services is heating up. This summer, Tesla began offering rides in Austin and in the San Francisco Bay Area with a prototype of its self-driving software. And although Tesla still has employees in each of its cars, CEO Elon Musk has said he plans to offer a rider-only service soon — something Waymo did in 2019.
Zoox, a self-driving subsidiary of Amazon, has a rider-only service in Las Vegas that serves a set of fixed pick-up and drop-off locations, with plans to expand. And several Chinese tech companies are racing ahead with robotaxi projects of their own.
Waymo’s decision to start using freeways coincides with major expansion plans. The company has announced plans to more than double the number of cities it operates in, with some cold-weather cities, such as Denver and Detroit, on its list. The company said Wednesday it would begin curbside service at San Jose’s airport, the second major airport to accept Waymo after Phoenix. The company is preparing to add a new van to its fleet called the Zeekr RT to supplement the Jaguars that it uses. And earlier this year, Waymo signed a partnership with Toyota to explore putting Waymo’s technology into personally owned vehicles.
Robotaxi services such as Waymo’s and Tesla’s work much like ridehailing from Lyft or Uber, with customers ordering a ride on a smartphone app by entering a destination and accepting a fare determined up front. But instead of humans behind the wheel, software generally drives the vehicles aided by cameras and, in the case of Waymo, other sensors such as lidar.
But safety concerns remain paramount. Cruise, a former subsidiary of General Motors, has stood as a cautionary tale since 2023 when California revoked its permits to operate a fleet of robotaxis, following a crash in San Francisco in which one of Cruise’s cars dragged a pedestrian for 20 feet while she was pinned underneath the vehicle. A Waymo recently struck and killed a cat in San Francisco, and its vehicles have sometimes been sitting ducks for arson or vandalism.
Waymo has not had a human fatality, and in July, the company said it had passed more than 100 million miles without a human behind the wheel.
Srikanth Saripalli, the director of the Center for Autonomous Vehicles and Sensor Systems at Texas A&M University, said he thinks Waymo’s technology is as good as a human driver and he praised the company’s safety record. But he said Waymo still needs to prove that it can safely handle situations outside California and the Sun Belt.
“Their safety record among all autonomous companies is amazing, but when you compare them to humans, they’ve been very careful about the kind of cities they want to drive in,” he said.
“In Phoenix, the roads are all perpendicular, the roads are nice, the weather is nice, and it still took them almost a decade to get to a freeway,” he said. He has worked as an industry consultant but not for Waymo.
About 18% of all traffic fatalities occur on interstate highways or other freeways and expressways, according to data compiled by federal safety regulators.
To tackle highways, Waymo said it had studied hazards such as aggressive cut-ins, construction on shoulders, hydroplaning and high-speed collisions. It said it has been giving freeway rides to employees and their guests for more than a year. And even now, the company said it would expand its use of freeways gradually as it watches for how the vehicles respond, rather than making it available to all of its customers at once.
The company said its robotaxis would stick to the speed limits on freeways, as they do city streets, even if human drivers around a vehicle are breaking the speed limit.
“The Waymo driver goes up to the posted speed limit. So, for example, if the speed limit is 65, that’s the maximum speed limit, and it does not exceed it, unless in extraordinary circumstances,” said Jacopo Sannazzaro, a product manager at Waymo.
Freeway capability is an important part of a car service, especially in cities such as Los Angeles and Phoenix, where it’s common for daily car trips to include at least some time on an interstate. Sticking to local streets often means a longer ride.
And while some traffic regulators and city-dwelling critics have braced for the possibility that robotaxis will add to traffic congestion, Waymo said it believes those concerns are unfounded.
“We do not expect Waymo to make congestion worse on the freeways,” said Pablo Abad, a Waymo product manager. He said the company had “not seen any impact on the congestion in the service areas where we operate.”
Starbucks workers attend a rally as they go on a one-day strike outside a store in Buffalo, New York, US, November 17, 2022.
Starbucks has been working hard to bring back customers, promising faster service and a return its coffeehouse roots, with ceramic mugs and hand-written notes.
But though sales show signs of perking up, the company is still wrestling with a years-long labour fight that threatens to hamper its turnaround.
Picket lines could greet customers collecting their morning latte at some US stores on Thursday,as the company faces another strike by unionised baristas, calling for better pay and increased staffing.
The walkout, expected to affect stores in at least 25 cities, is the third major strike to hit the company in the US since the union, Starbucks Workers United, launched four years ago.
Baristas and their union say the new turnaround policies, have only added to their workload.
“Every single day at this company, as of recently, has been very, very difficult to be a barista,” said Michelle Eisen, a spokesperson for the union, which says it represents workers at more than 600 stores in the US.
“You should not be evolving to the point of running your workers to the ground,” said Eisen, who worked as a barista for 15 years before leaving Starbucks this May.
Starbucks says it does not expect the strike to disrupt operations at the “vast majority” of its more than 10,000 company-operated stores in the US. During previous coordinated strikes, fewer than 1% of stores participated, the company said, adding that it expected the same turnout this time.
But the action, timed to coincide with Starbucks’ Red Cup day, a major holiday sales event, risks returning unwanted scrutiny to the company at a delicate moment.
Getty Images
In recent years the brand has facedconsumer boycotts, a wave of new competitors and a customer backlash over high prices, as well as turmoil in its leadership ranks.
The arrival last year of new chief executive Brian Niccol, a veteran of successful turnarounds at Chipotle and Taco Bell, raised hopes he could do the same for Starbucks. Investors sent the chain’s shares up 24%.
He quickly embarked on changes, part of what he called his “Back to Starbucks” strategy. He banned non-customers from bathrooms, enforced a stricter dress code for staff and re-introduced comfy seating that he said would help restore the chain’s appeal.
At the same time, Starbucks has outlined plans to invest more than $500m to improve coffeehouse staffing and training.
‘Building momentum’
Progress has been slow. Last month, Starbucks reported 1% growth in sales at global stores open at least one year – its first quarterly increase in almost two years. But in the US, sales were flat.
“We have more work to do, but we’re building momentum,” Mr Niccol said on a recent call with analysts.
But the new strategy has been accompanied by hundreds of store closures, thousands of layoffs and the sale of a 60% stake in its China business, and labour tensions have continued to fester.
Starbucks Workers United leaders say relations improved last year, but that contract discussions stalled when Mr Niccol – who was in charge of Chipotle when it faced complaints of labour rights violations – took the helm of the company last September.
Even after the two sides agreed to bring in a mediator in January, they remained at odds over pay, staffing and hundreds of unresolved charges of unfair labour practice.
Getty Images
A union spokesperson said Starbucks has offered no pay raises in the first year of a contract, then 2% in the years following, which he said fails to account for inflation and the cost of healthcare. Baristas overwhelmingly voted down the contract offer in April.
The company, on the other hand, blames the union for stalled talks. The union’s demands for pay increases would “significantly affect store operations and customer experience”, Sara Kelly, the company’s chief partner officer, said in a statement last week.
“When they’re ready to come back, we’re ready to talk,” Jaci Anderson, a spokesperson for Starbucks, said in a statement.
“Any agreement needs to reflect the reality that Starbucks already offers the best job in retail,” she added, pointing to low staff turnover rates, and pay and benefits, that the company says add up to an average hourly wage of $30.
Pressure on the brand
Unionised coffeeshops account for only about 5% of all Starbucks stores that are directly owned by the corporation in the US, but union organisers say they have added roughly 100 more stores over the last 12 months.
This continued stand-off could pose both an operational and a reputational risk for the firm, say analysts.
The brand had already shown signs of being under pressure, said Laurence Newell, managing director in the Americas for Brand Finance, a consultancy that tracks brand strength. Starbucks fell to 45th place in its 2025 annual ranking – its lowest level since 2016 – driven in part by a decline in its reputation among customers.
“Happy customers have to come from happy employees,” said Stephan Meier, a professor of business strategy at Columbia Business School. “You can’t do that top down.”
This week, more than 80 Democrats in the House and Senate sent letters to Mr Niccol, accusing Starbucks of “union-busting” and urging the company to bargain in good faith.
Joe Pine, management adviser and co-author of the “Experience Economy”, said Mr Niccol had a lot on his plate, but he was “surprised” that he had allowed the issue to remain unresolved.
“This would seem to be one of the first things you need to do: you need to have your people on board,” he said.
Roula Khalaf, Editor of the FT, selects her favourite stories in this weekly newsletter.
Vladimir Putin has approved the sale of Citigroup’s Russian business, as the US bank continues to wind down its exposure to the country in the wake of its war in Ukraine.
In a statement on Wednesday, Putin’s office said it had approved the sale of Citi’s Russian subsidiary to Moscow-based investment bank Renaissance Capital for an undisclosed sum.
Citi confirmed the potential sale but did not name Renaissance as the buyer, adding that it would be subject to additional approvals. Renaissance confirmed the sale to the Financial Times, without providing further details.
The announcement brings the Wall Street bank closer to a full exit from Russia. Citi first announced plans to exit the country’s retail market in April 2021 as part of a wider retreat from consumer banking outside the US by chief executive Jane Fraser.
The bank then tried to sell its Russian business but faced a limited pool of buyers due to western sanctions imposed on the country as a result of Putin’s full-scale invasion of Ukraine in February 2022.
Citi said in August 2022 that it would wind down its retail and commercial banking operations in Russia after Putin banned foreign entities from “unfriendly” countries that imposed sanctions on Moscow over the war from selling their stakes in Russian companies, which further complicated the process.
Since then, Citi has closed nearly all of its institutional banking services in Russia and in 2024 closed its last retail branch in Russia and deactivated all of its debit cards.
This year, the Kremlin approved the sale of Goldman Sachs’ Russian subsidiary to an Armenian investment fund, shortly after Dutch lender ING also announced its exit.
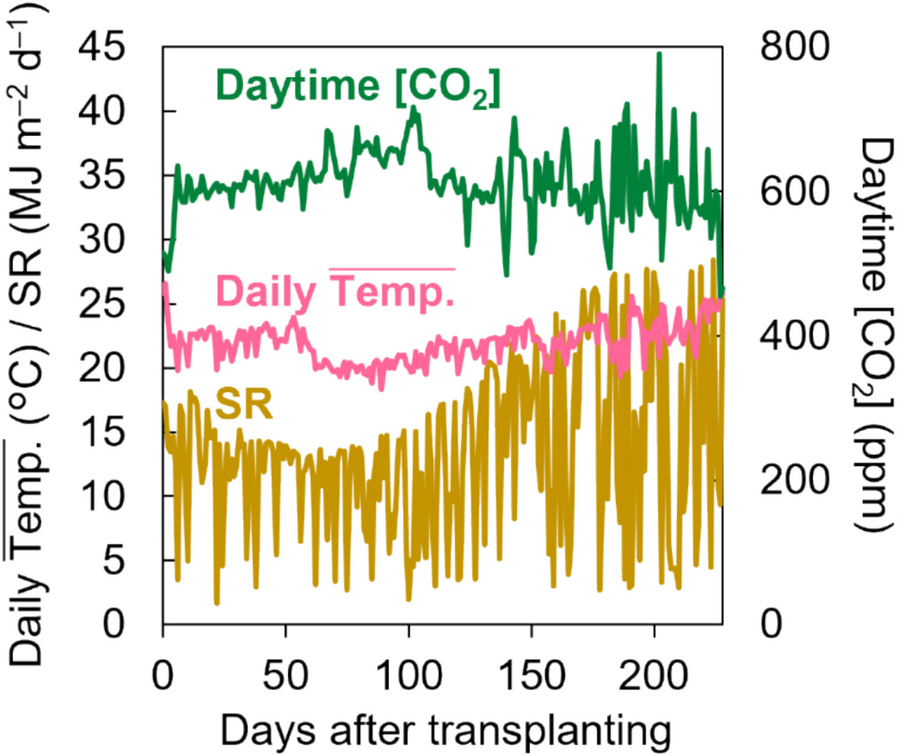
To demonstrate the potential effects of cultivar-dependent variation in shoot architecture on cucumber yield, we selected four commercially available Japanese cultivars (‘Josho’, ‘S-30’, ‘G-Flush’, and ‘Yusho’), which are recognized for their different levels of vigor. The experiment was conducted in 2021, with plants grown in a greenhouse under the conditions shown in Fig. 1. We assessed node numbers and found that ‘Josho’ had formed more nodes than all other cultivars by the end of cultivation period (Fig. 2A). Then, we analyzed changes in the NFR, calculated as the number of nodes formed per unit of daily average temperature, throughout the experiment (Fig. 2B). The NFR was higher in ‘Josho’ than in the other cultivars, particularly ‘S-30’ and ‘Yusho’. The mean NFRs were 2.2 × 10–2 nodes °C–1 day–1 for ‘Josho’ and approximately 1.5 × 10–2 nodes °C–1 day–1 for the other cultivars. A similar trend was observed in a separate short-term experiment conducted in a different greenhouse and year (Fig. S2), suggesting that the observed differences are cultivar-dependent rather than condition-dependent. We also noted cultivar-specific variation in the position of open female flowers along the stem. In ‘Josho’, open female flowers tended to appear at nodes farther from the shoot tip compared to the other cultivars (Fig. S3), implying more rapid stem growth. These findings indicate that the cultivars are distinguishable by their shoot architecture, particularly in terms of NFR and node number.
Fig. 1
Growth conditions during cultivation. Daytime CO2 concentration, daily average temperature within the greenhouse, and cumulative daily solar radiation are shown
Fig. 2
Node formation rate (NFR) and fruit yield of each cultivar. A Changes in the number of nodes. Node number was expressed as a function of accumulated temperature (AT). B Changes in the NFR in response to AT. C Cumulative fresh yields. D Total amount of harvested fruit. Data are means of six (A, B) or nine (C, D) plants with 95% confidence intervals (CIs). Different letters indicate significant differences in the final value (A, C, and D) or average NFR throughout the experiment (B) (P < 0.05, Tukey’s test)
Comparison of fruit yield among cultivars
Final fresh yield was highest in ‘Josho’ (approximately 36.3 kg m–2), consistent with its elevated NFR compared to the other cultivars (Fig. 2C). The number of harvested fruits followed a similar pattern: ‘Josho’ produced around 360 fruits per unit area, whereas the other cultivars yielded approximately 300 or fewer (Fig. 2D). Mean harvested fruit weight was around 100 g fruit–1 (Fig. S4A). The ratio of aborted fruits, which were excluded from yield calculations, was higher in ‘Josho’ (approximately 7.4%) than in the others (1.0% or less, Fig. S4B). Female flowering rates were broadly similar across cultivars, although ‘G-Flush’ exhibited a slightly lower rate (Fig. S4C). These findings suggest that yield differences were primarily driven by variation in node formation, rather than by fruit abortion or female flowering frequency in the cultivars examined.
DM distribution
Next, we compared the cultivars in terms of how DM was partitioned to fruit. The experimental period was divided into five terms based on the timing of destructive measurements (term 1: 0–45 DAT; term 2: 45–66 DAT; term 3: 66–105 DAT; term 4: 105–142 DAT; term 5: 142–228 DAT), and DM partitioning was analyzed for each term. As shown in Fig. 3A, DM partitioning in ‘Josho’ during the first term was 0.15 g g–1 and remained around 0.5 g g–1 in later terms. In contrast, the other cultivars, particularly ‘Yusho’, showed higher early DM partitioning (approximately 0.2 g g–1) but failed to maintain these levels beyond the third term. In the final term, DM partitioning in ‘S-30’, ‘G-Flush’, and ‘Yusho’ declined to approximately 0.4 g g–1. As a result, the cumulative fruit dry yield relative to TDM in ‘Josho’ continued to increase, reaching 0.48 g g–1 by the end of the experiment. In comparison, the other cultivars peaked at around 0.44 g g–1 on 105 DAT and declined thereafter (Fig. S5A). Additionally, DM content per fruit was comparable across cultivars, confirming that fruit quality was consistent (Fig. S5B). Together, these results indicate that reduced node formation suppressed DM partitioning to fruit.
Fig. 3
Dry-matter (DM) partitioning and productivity of each cultivar. A DM production and distribution of fruits analyzed for five intervals between destructive measurements. B Light use efficiency (LUE). Lines and shading indicate regression lines for TDM and their 95% CIs, respectively. LUE was estimated as a regression coefficient. Total DM (TDM) at the end of cultivation (TDM228) is also shown. Data are means of three (first to fourth destructive measurements) or nine (last measurement) plants with 95% CIs. Different letters indicate significant differences (P < 0.05; Tukey’s test) within the same intervals (A, lower case: DM fraction rate; upper case: TDM) or among cultivars (B)
DM productivity
Although yield differences among the cultivars could be attributable to variation in both shoot architecture and DM productivity, this did not appear to be the case in the present experiment. TDM across the five experimental terms was largely comparable among cultivars, except during the third and final terms (Fig. 3A). Notably, ‘S-30’, but not ‘Josho’, tended to exhibit higher TDM. In the third and final terms, TDM in ‘S-30’ reached 417 and 1,484 g m–2, respectively, while the values for ‘Josho’ were 348 and 1,431 g m–2. ‘Yusho’ showed the lowest TDM in the final term (1,329 g m–2). As LAI was maintained at approximately 2.4 m2 m–2 across all cultivars, cumulative IL was estimated to be similar among cultivars (around 650 MJ m–2; Fig. S6). Consequently, LUE varied as shown in Figure S7, with ‘S-30’ exhibiting the highest LUE (4.26 g MJ–1), followed by ‘G-Flush’ (4.08 g MJ–1), ‘Josho’ (4.07 g MJ–1), and ‘Yusho’ (3.86 g MJ–1). Similar trends were observed in TDM at the end of the experiment (Fig. 3B). The discrepancies between yield and TDM or LUE suggest that DM productivity had only a marginal effect on yield differences among cultivars. Indeed, correlation analysis of the yield components revealed no significant relationship between yield and DM productivity. In contrast, a strong correlation was observed between node formation and fruit yield (Fig. 4). These findings demonstrate that cultivar-dependent shoot architecture can influence fruit yield independently of DM productivity in cucumber plants.
Fig. 4
Assessment of the four cucumber cultivars based on yield components. Data obtained for each cultivar were pooled and correlations among yield components were analyzed. The correlation matrix is visualized as a heatmap. Asterisks indicate significant correlations (*P < 0.05, **P < 0.01; Benjamini–Hochberg adjustment). DMC, DM content of fruits
Transcriptomic diversity among cultivars
In cucumber plants, nodes are produced by the SAM while flowers develop from the leaf axil at each node [3], underscoring the importance of SAM activity for yield. Certain meristem identity-regulating genes determine whether the SAM exhibits determinate or indeterminate growth in Cucumis sativus [3]. These findings suggest genetic diversity among the shoot tips of the four cultivars. To explore this possibility, we performed mRNA-seq using RNA extracted from their shoot tips. We identified more than 500 differentially expressed genes (DEGs), assessed using the criteria |fold change|> 2 and false discovery rate (FDR) < 0.05, in pairwise comparisons between ‘Josho’ and the other cultivars (Figs. 5 and S8, and Dataset S1). We also examined the expression of genes previously reported to regulate SAM identity (Table S1), including PEBPs involved in floral meristem induction (CsFT, CsTFL1, CsTFL1d); subunits of protein complexes including CsFT or CsTFL1/CsTFL1d (CsNOT2a, CsFD, CsFDP, CsGF14-3, CsGF14-5); and transcription factors and their interactors involved in SAM maintenance and floral meristem differentiation (CsLFY, CsWUS, CsUFO, CsHAN1, CsHAN2, CsSTM, CsBP). We initially expected some of these genes to meet the criteria for differential expression, but none qualified as DEGs. However, CsTFL1 in ‘S-30’, CsGF14-3 and CsGF14-5 in ‘G-Flush’, and CsBP in all three cultivars showed modest reductions (approximately 30% on average) compared to ‘Josho’ (Dataset S2). To further investigate physiological differences, we conducted Gene Ontology (GO) enrichment analysis of DEGs common among ‘S-30’, ‘G-Flush’, and ‘Yusho’. We selected 42 downregulated and 16 upregulated genes and analyzed their enrichment in biological processes. Only one GO term was significantly enriched among upregulated genes, related to carbon fixation. This term included two DEGs: CsaV3_4G001210, which encodes a putative CP12 domain-containing protein, and CsaV3_6G048750, a putative RbcX homolog (Fig. S9A and Datasets S3 and S4). In contrast, downregulated DEGs were enriched for GO terms associated with heat response, cell division, and β-oxidation. These included putative condensin proteins (CsaV3_UNG044290, CsaV3_UNG075600, CsaV3_UNG088700, CsaV3_UNG225770), heat-shock proteins and co-chaperones (CsaV3_1G035820, CsaV3_1G035830, CsaV3_1G044020, CsaV3_3G006720, CsaV3_5G026520), a multiprotein bridging factor 1c (MBF1c) homolog (CsaV3_2G002310), an ankyrin repeat-containing protein (CsaV3_1G010260), and 3-hydroxyacyl-CoA dehydrogenase proteins (CsaV3_6G023960, CsaV3_6G024070, CsaV3_024110) (Fig. S9B and Datasets S3 and S4). These findings indicate that the shoot tips of the four cultivars differ at the transcriptional level, which may reflect genetic factors underlying the observed variation in NFR.
Fig. 5
Comparison of the transcriptome in shoot tips between the ‘Josho’ cultivar and other cultivars via mRNA sequencing. (A) Volcano plots representing each pairwise comparison. Horizontal and vertical axes represent fold changes (FCs) and false discovery rates (FDRs), respectively, in logarithmic scale. See also Figure S8. (B) FCs of genes involved in shoot apical meristem (SAM) maintenance and floral meristem differentiation reported in previous studies (Table S1). Asterisks indicate the FDR and FC of each gene (*FDR < 0.05; **FDR < 0.01). (C) Venn diagrams representing the numbers of genes down- or upregulated in the ‘S-30’, ‘G-Flush’, and ‘Yusho’ cultivars compared to ‘Josho’. Common differentially expressed genes (DEGs) are shown in bold. (D) Gene Ontology (GO) enrichment analysis of biological processes. The top 10 GO terms are shown for the common down- and upregulated genes in ascending order of P values adjusted using the Benjamini–Hochberg method. Normalized count data and overall GO enrichment analysis results are provided in Datasets S1–S4
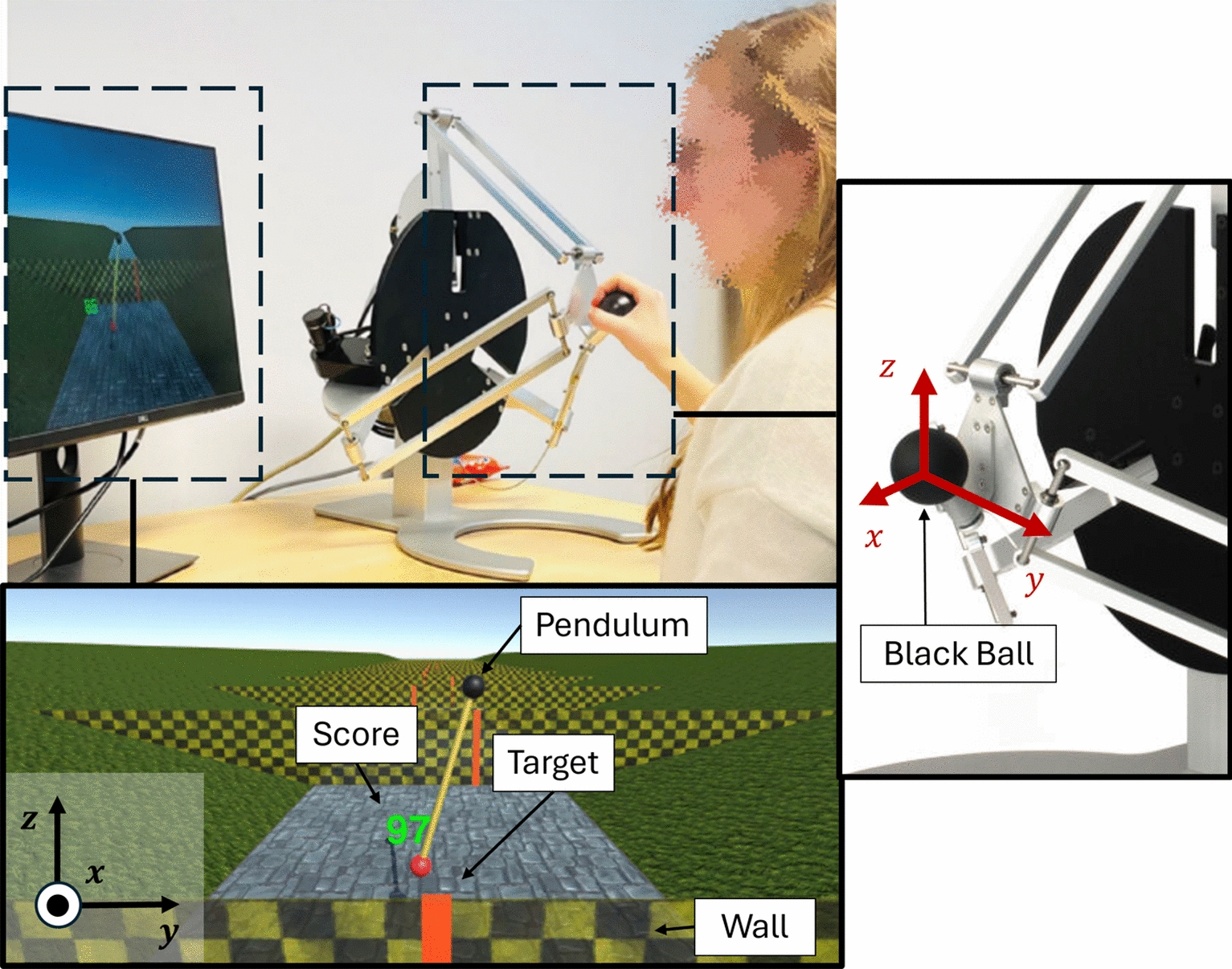
The experimental setup included a (Delta.3) haptic robot (Force Dimension, Switzerland) placed on a desk next to a display monitor (Fig. 1). The device is capable of measuring positions and providing forces up to 20.0 N in the three translational directions (x, y, and z axes, Fig. 1). The device control was implemented in C++, operating at 4 kHz. Motion data was recorded at 1.67 kHz.
Fig. 1
The experimental setup (up left) consists of the screen and the (Delta.3) (Force Dimension, Switzerland). Down left: Game screenshot with the pendulum, walls in black and yellow, targets as vertical red lines, and the score in green numbers. Right: The device could be controlled by holding the black ball attached to the robot end-effector
The pendulum game
The game, inspired by the work of [44] and created in Unity 3D (Unity Technologies, USA), consisted of controlling a virtual pendulum to hit moving targets approaching the participant. The pendulum consisted of a black ball (pivoting point) and a red ball (pendulum mass), with a rigid link connecting both balls, as shown in Figs. 1 and 2. The pendulum’s pivoting point could be moved horizontally and vertically (y and z axis in Fig. 2) by displacing the haptic device’s end-effector (black ball in Fig. 1 Right; 1:1 movement mapping). The pendulum could only swing in the vertical plane (y–z), and therefore, movements of the haptic device in the x-direction were not mapped to the pendulum.
Fig. 2
Left: Front view of the pendulum with forces applied on the pivoting point. (F_{HG}) represents the force from the haptic guidance while (F_{rod}) is the force from the pendulum dynamics. Center: 3D representation of the game. Right: Top view representation of the game with exemplary trajectories of the pivoting point and the pendulum mass, in black and red dashed lines respectively. The red lines within the walls represent the targets. The variable b represents the target position with respect to the centerline, while the variable a represents the absolute error between the pendulum mass and the target
The task consisted of hitting vertical targets with the pendulum mass. The targets were located on walls approaching the participants in the x direction, i.e., perpendicular to the screen plane. The walls were spaced by 1 m and their speed was set to 1 m/s. The targets could appear in three different positions: the center point of the wall or ± 0.12 m to the right/left. The target’s width was 0.02 m, and the pendulum ball and pivoting point diameter were set to 0.03 m.
By moving the pendulum pivoting point through the device end-effector, participants influenced the swing of the pendulum, which behaved according to the equation of motion of a simple pendulum:
where y and z are the horizontal and vertical coordinates of the robot end-effector position and (ddot{theta }) the angular acceleration of the pendulum’s internal degree of freedom (DoF). Since the internal DoF was located at the pendulum’s pivoting point, (theta ) was defined relative to the pendulum rod, as illustrated in Fig. 2. The robot’s coordinates were referenced with respect to its initial position after calibration, similar to the one shown in Fig. 1right. The pendulum mass was set to (m = 0.6) kg, the rod length to (l = 0.25) m, gravity to (g = 3.24) m/(s^2), and the constant (c = 3.00e^{-6}) N(cdot )s/rad. These parameters were adjusted and chosen in order to minimize passive stabilization of the pendulum and maintain task difficulty.
As the pendulum crossed a wall, a score based on the absolute distance of the pendulum’s mass to the center of the target in the y-direction (|Error|) was briefly displayed for 0.5 s to provide feedback regarding participants’ performance. The score ranged between 0 and 100 and was calculated as:
$$begin{aligned} Score = {left{ begin{array}{ll} 0 & text {if } |Error| ge 0.2,m, \ 100-500cdot |Error| & text {if } |Error| < 0.2,m. end{array}right. } end{aligned}$$
(2)
Each phase of the experiment was organized into wall sets, with 20 walls presented per set (see the Study protocol Section). A final score, based on the average of all 20 scores, was shown at the end of each set to inform participants of their overall performance in that set.
Haptic rendering and haptic guidance
To enhance the ecological validity of the task — ensuring the experimental conditions closely replicate real-world scenarios — we incorporated haptic rendering throughout the whole experiment, i.e., the provision of the forces originating from the pendulum dynamics on the device end-effector. Participants could feel the pendulum force dynamics ((F_{rod})), calculated as:
Participants allocated to the Experimental group were also provided with haptic guidance during training to physically assist them in the target-hitting task. This was achieved by first calculating an optimal end-effector trajectory between the pendulum state at the moment of target wall collision and the target at the following wall, and then enforcing this trajectory using a Proportional-Derivative (PD) controller.
The optimal end-effector trajectory was calculated every time the pendulum hit a target wall using the ACADO toolkit [45]. The cost function included terms to maximize accuracy (i.e., minimize the distance between the pendulum ball and the next target’s centerline), maximize the pendulum stabilization (i.e., penalizing the velocity components of the pendulum ball), and minimize end-effector acceleration based on the current state of the pendulum, as described in the Appendix B.
The PD controller aimed to minimize the distance between the end-effector and the reference trajectory in the y-direction at each time point by applying a guiding force (F_{HG}) at the end-effector. We only provided guidance in the y-axis as it was sufficient to achieve the target-hitting tasks. By not guiding in the z-direction, we also reduced the potential masking effects of the guidance on the perception of the haptic rendering of the pendulum dynamics. The resulting equation for the PD controller is as follows:
where the y-axis error between the actual and the reference trajectory was denoted as e(t), and the proportional ((K_p)) and derivative ((K_d)) gains were set to 75.0 N/m and 15 N(cdot )s/m, respectively. The guiding force was added to the haptic rendering force ((F_{rod}) in Eq. (3)). The order of magnitude of the guidance force was around four times the haptic rendering.
Participants
Forty-two unimpaired participants performed the experiment. Data from two participants were excluded from further analysis. One participant exhibited errors three standard deviations higher than the average of all participants. We encountered a technical problem when recording the data of a second participant, leading to missing data within the dataset. Thus, 40 participants were included in the analysis (age = (27 pm 6,yrs); 19 identified as female, 21 identified as male; no participants identified as non-binary). The target sample size of approximately 40 participants was determined based on a power analysis, as detailed in Appendix A. Handedness was assessed using the Short-Form Edinburgh Handedness Inventory [46], resulting in 35 right-handed, four left-handed, and one ambidextrous participant. All participants signed the informed consent to participate in the study, which was approved by the TU Delft Human Research Ethics Committee (HREC).
Participants were allocated into two training groups: Control or Experimental. The Experimental group received haptic guidance during some parts of the training phase (see the Study protocol Section), while the Control group practiced without any physical assistance. To promote an even distribution between groups, we used an adaptive randomization method. We randomly allocated the first twenty participants into one of the two training groups and distributed new ones into each group based on their sex and results from the Locus of Control questionnaire (see the Outcome metrics Section), similar to [7]. The Locus of Control was employed as it directly relates to the perception of control, which aligned with the groups’ training conditions (guidance vs. no guidance).
Study protocol
The experiment was conducted in two locations: Delft University of Technology, Delft, the Netherlands, and Alten Netherlands B.V., Rotterdam, the Netherlands. The experimental setup and protocol were identical in both locations. Minor environmental differences (e.g., room layout, lighting) were not expected to systematically affect performance. The overview of the experimental protocol can be found in Fig. 3.
Fig. 3
The study protocol included two sessions spaced by 1 to 3 days. A set comprised 20 targets. D.C.: Data collection, QUEST.: Questionnaires, s: Seconds, T1: Position transfer task, T2: Dynamics transfer task, STR: Short-Term retention, LTR: Long-Term retention, Exp.: Experimental
The experiment took place in two sessions on different days, with one to three days between sessions, following recommendations to evaluate motor learning [3]. At the beginning of the first session, participants were invited to sit at the set-up table. The chair height was adjusted based on personal preferences to ensure a comfortable arm movement within the robot’s workspace. The haptic device was placed at a reachable distance with a relaxed posture on the dominant hand’s side. The screen was placed on the opposite side of the device in front of the participant. Participants were informed about the goal of the pendulum task at the beginning of the first session. No extra information was given during the rest of the experiment.
The experiment began by inviting participants to fill out the first block of questionnaires, including demographic data collection and the questionnaires to quantify the personality traits (see the Outcome metrics Section). Participants were then invited to familiarize themselves with the haptic device and the virtual environment for 40 s. During this familiarization phase, they were asked to move the pendulum freely in the virtual environment without loading any target. They could observe the pendulum moving and feel the haptic rendering of the pendulum dynamics through the haptic device end-effector. Once the 40 s were over, participants were instructed again about the game goal: move the pendulum such that the red ball hits each wall as close as possible to the target’s center. They were then invited to play a first set of 20 targets.
Once the familiarization was completed, the main experiment began. Participants underwent three main phases during Session 1: baseline, training, and short-term retention. During these phases, participants performed one or three different tasks. The main task consisted of playing 20 targets in a specific order. Each time the main task was played, targets were set in the same sequence of positions, except during the training phase, in which some of the sets were mirrored (further explained later in this section). Participants also played two transfer tasks to asses the generalization of the acquired skill. Those tasks were similar to the main task but included slight design variations. In the position transfer task, the targets were randomly re-located (still appearing every 1 s) to introduce new movement sequences. During the dynamics transfer task, the target positions were kept the same as during the main task, but the pendulum dynamics were changed. While the appearance of the pendulum did not change, the pendulum rod length was reduced by 70% in Eq. (1) and (3). This variation affected the pendulum’s natural frequency, which increased from 0.573 Hz to 0.685 Hz. For both transfer tasks, the goal remained the same: Use the pendulum mass to hit each target.
The baseline included two sets of 20 targets for the main task. The game did not stop between sets within the same task, but there was an extended pause of three seconds in which no new targets were loaded. After the second set was finalized, participants completed a new set of questionnaires to assess motivation and agency. To keep our analysis focused on answering the listed hypotheses, the analysis of motivation and agency are out of the scope of this work. Participants were then asked to play the game two more times, for two sets of the position transfer task and two sets of the dynamics transfer task, with an on-demand break offered between the two tasks.
After the baseline trials were complete, participants began the training. They completed two rounds of 15 sets of the main task of 20 targets each. Participants had the opportunity to take a break between rounds. During training, the Experimental group received haptic guidance on top of the haptic rendering. However, to avoid participant reliance on the guidance, guidance was removed during the first set and once every five sets (“catch sets”). In addition, to avoid only learning the specific movement patterns and target positions, mirrored sets were interspersed within the non-catch sets for both groups. The position of the targets during these sets was mirrored with respect to the walls’ y-axis. The distribution of “catch sets” and mirrored sets can be found in Fig. 3. Participants were informed that they might or might not be assisted during training to promote active participation. The Control group only experienced the haptic rendering from the pendulum dynamics during training.
Immediately following the last training set, participants took a 10-minute break. During this time, they filled in a new set of questionnaires. The Experimental group was asked questions about their subjective experience with the robotic guidance, i.e., how disturbing, frustrating or restrictive it was perceived (see the Outcome metrics Section). Following the break, a washout set of the main task was conducted by both groups to mitigate any temporary effects from training with haptic guidance, e.g., “slacking” [47].
Right after the washout set, participants performed the short-term retention phase. The structure was similar to the baseline but without the questionnaire. Participants returned after one to three days to perform a long-term retention phase, which was structured identically to the baseline tests.
Outcome metrics
Personality traits questionnaires
Before the familiarization phase, participants completed a battery of questionnaires assessing the selected personality traits to study. These personality traits included the LOC scale [34], the Transform of Challenge and Transform of Boredom sub-scales from the Autotelic personality questionnaire [33], and the Achiever and Free Spirit sections of the Hexad Gaming style questionnaire [39]. All the questionnaires, except for the LOC, were formed by seven-point-based questions and normalized between 0 and 1 (low to high level of trait/characteristic). The LOC questionnaire was formed by 23 multiple-choice questions, and the overall score for the whole questionnaire ranged from 0 to 23. To improve interpretability and facilitate later modeling (see the Statistical analysis Section), this range was normalized from -1 to 1 to reflect the continuum between Internal LOC (-1) and External LOC (1), which are widely recognized classifications in literature and commonly used to interpret behavior. In addition, the LOC scores usually follow an approximate Gaussian distribution centered near zero. This makes this range statistically practical and close to the centered scale. Internal and external LOC differ in whether outcomes from an action are attributed to oneself or external circumstances, respectively. The employed questions for all the questionnaires can be found in the Appendix C.
Human-robot interaction experience questionnaire
Three questions were filled in by only the Experimental group after training. These questions related to frustration, disturbance, and restrictiveness perception during the training (see Appendix C). They were answered on a seven-point scale, which was then normalized between 0 and 1 (low to high).
Task performance: absolute error
To assess motor learning, the distance between the pendulum’s mass position and each target’s centerline at the time of pendulum-wall contact was calculated (|Error|), in meters. This was used as our performance metric and one value per wall was obtained.
Human-robot interaction: interaction force
To assess participants’ interaction with the haptic device, the human-robot interaction force was estimated. This estimate was computed using Reaction Torque Observers based on recorded motor currents and the robot dynamic model, as implemented in [44]. For the analysis, we used the average force per target in Newtons. We calculated this average force within the interval from consecutive midpoints between walls.
Statistical analysis
To evaluate the hypotheses outlined in the Introduction Section, we used Linear Mixed Models (LMMs). These models were fitted using the (texttt{lmer}) function from the (texttt{lmerTest}) package in (texttt{R}). Statistical significance was set at (p < 0.05), and p-values were adjusted for multiple comparisons using Bonferroni correction.
The employed LMMs were selected as outlined in Appendix D. We group them throughout the current section depending on the hypotheses they are tailored to evaluate. Table 1 summarizes the variables that can be included in the models. Task performance (|Error|) and human-robot interaction force (|IntForce|) metrics were analyzed as dependent variables depending on the model. Logarithmic transformations were applied to correct skewed distributions and achieve normality requirements.
Table 1 Variables employed for the LMM. Data was structured at the target level; However, in models where this structure was not applicable, the dataset was reduced to eliminate duplicate entries. The variables |Error| and |IntForce| were log-transformed to address skewness in their distributions
Models to infer motor learning (M1.1 and M1.2)
To evaluate the impact of personality traits and the training condition on motor learning outcomes across different experimental phases (related to hypotheses H1 and H2) we employed two models, one for each dependent variable. These models include independent variables regarding the training group, the task type, the stage, and the personality traits (see description in Table 1). Given the extensive number of variables and potential interactions, a stepwise comparison between models of different complexity was performed using the Akaike Information Criterion (AIC) and Bayesian Information Criterion (BIC) to prevent overfitting and ensure stability (see Appendix D).
For the performance metric (|Error|), the following model (M1.1) with the smallest AIC and BIC was chosen:
$$begin{aligned} log_{{10}} |{text{Error}}| & = Group times (Task + Stage) \ & + (TC_{c} + LOC_{c} ) \ & times (Task + Stage + sIndex) \ & + Task times Stage + Group \ & times TC_{c} times Stage + (1|ID) \ & + (1|wIndex:NewWalls). \ end{aligned} $$
In this equation, the normalized and centered results from the Transform of Challenge ((TC_c)) and Locus of Control (LOCc) were included as traits of interest, as others did not show statistical significance during model selection. Therefore, the hypothesis related to the Achiever gaming style (H1.3) is not supported by the data. A nested random effect for wall index (wIndex : NewWalls) was adjusted to account for changes in wall positioning during the position-based transfer task.
A similar model (M1.2) was developed for the interaction force metric. Notably, this model included an additional interaction term, (Group times LOC_c times Stage). When compared with other configurations, the model with this extra interaction led to a lower AIC and slightly increased BIC (see Appendix D). In view of these competing results, previous literature was used to guide the choice. This extra relationship was considered of interest as LOC was found to correlate to the interaction force metric during the training phase when the haptic guidance was active (see [43]). The final model has the form:
$$ begin{aligned} log _{{10}} |{text{IntForce}}| & = Group times (Task + Stage) \ & + (TC_{c} + LOC_{c} ) \ & times (Task + Stage + sIndex) \ & + Task times Stage + Group times TC_{c} \ & times Stage + Group times LOC_{c} \ & times Stage + (1|ID) \ & + (1|wIndex:NewWalls). \ end{aligned} $$
Note that while this model does not include the Free Spirit gaming style, results from an alternative model (see Appendixes D and E) suggest a potential relationship between this trait and interaction force outcomes, which can be considered of interest for hypothesis H1.4. Yet, fully evaluating this effect would require studying the model complexity beyond the current study’s scope, complicating the understanding of the results. As such, we leave a thorough investigation of H1.4 for future work.
Human-robot interaction perception model (M2)
To investigate whether subjective perceptions of human-robot interaction (HRI) influenced task performance (H3), we employed the following model:
where the HRIQuestion represents the normalized and centered response to each of the specific HRI perception questions. The normalized and centered version of four of the traits were considered of interest for this model, i.e., the Achiever ((AC_c)) and Free Spirit ((FS_c)) gaming styles, Transform of Challenge ((TC_c)), and Locus of Control ((LOC_c)). All the phases were included in this dataset (baseline, training, short- and long-term retention) while the transfer tasks were excluded as HRI questions were asked exclusively after the training phase, which did not include the transfer tasks.
Roula Khalaf, Editor of the FT, selects her favourite stories in this weekly newsletter.
Anthropic plans to invest $50bn in building artificial intelligence infrastructure in the US over the coming years, as the start-up races to secure new computing power.
The Claude chatbot maker on Wednesday said it would develop new data centres in New York and Texas with UK-based cloud computing start-up Fluidstack. The sites will bolster Anthropic’s research and development as well as providing power for its existing AI tools.
“We’re getting closer to AI that can accelerate scientific discovery and help solve complex problems in ways that weren’t possible before. Realising that potential requires infrastructure that can support continued development at the frontier,” said Dario Amodei, chief executive and co-founder of Anthropic.
The investment follows a flurry of deals by Anthropic’s chief rival OpenAI to secure chips and computing capacity from Nvidia, AMD, Broadcom, Oracle and Google, estimated to be worth about $1.5tn.
The circular arrangements between companies that act as suppliers, investors and customers of each other, combined with booming AI valuations, have added to concerns about a bubble in the sector.
Anthropic has also moved to boost its computing power this year. Last month, the four-year-old start-up signed a deal to secure access to 1mn Google Cloud chips to train and run its AI models.
The San Francisco-based group also has a partnership with Amazon, which is the start-up’s “primary” cloud provider and a large investor. It has invested $8bn in Anthropic and is building a 2.2GW data-centre cluster in New Carlisle, Indiana, to help train its AI models.
Its latest agreement will involve it partnering with Fluidstack, a small start-up that this year signed a deal with the French government to build a major computing cluster in France. Anthropic said it chose the company for its “exceptional agility”.
“We’re proud to partner with frontier AI leaders like Anthropic to accelerate and deploy the infrastructure necessary to realise their vision,” said Gary Wu, co-founder and CEO of Fluidstack.
Anthropic, which was recently valued at $183bn post-money, was founded by a group of former OpenAI employees. While OpenAI has focused largely on its consumer product ChatGPT, Anthropic has targeted enterprise customers.
The group’s run-rate revenue — a projection of annual revenue based on recent performance which is favoured by start-ups — shot from $1bn at the start of the year to $7bn last month. In September the company raised $13bn from investors including Iconiq Capital and Lightspeed Venture Partners.
The bonanza in the U.S. stock market in the past 10 years won’t be repeated in the coming decade, according to Goldman Sachs. Strategist Peter Oppenheimer expects the S & P 500 to return just 6.5% on an annualized basis to investors in the next 10 years, including dividends. That’s a far cry from the nearly 15% total return the benchmark has delivered in the past 10 years. Oppenheimer pointed to lackluster valuations and relatively weak dividend yields going forward. “The building blocks of our base case 6.5% return forecast consist of 6% annualized earnings per share growth, a 1% annualized decline in valuations and a 1.4% average dividend yield,” he wrote. “While valuations are very high today relative to history, multiples have generally trended higher during the last several decades,” he said. “This trend can largely be explained by the trend lower in interest rates and [trend] higher in corporate profitability. Going forward, without a dramatic increase in interest rates and/or sharp decline in corporate profitability, we think it likely that U.S. equity valuations will remain above long-term averages.” The S & P 500 currently trades at a forward price-to-earnings ratio of about 23 — near its highest levels of the past decade. Investors have been willing to pay that premium as they chase expected returns from artificial intelligence, pushing the benchmark stock index to all-time highs. Many companies working in AI have posted sharp earnings growth in the past few years. “The extraordinary earnings strength and elevated valuations of the largest U.S. firms have helped boost the earnings growth, multiples and returns of the aggregate U.S. equity market in recent years … If the profitability and/or valuations of the largest companies falter, unless another cohort of ‘superstars’ emerges, returns for the broad market will likely be hampered,” wrote Oppenheimer. As for dividends going forward, a 1.4% yield is well below that of the 10-year Treasury note yield, which is above 4%. Investors can also get more yield by holding a 2-year Treasury note (3.56% as of Wednesday morning). Bottom line: If Oppenheimer is correct, S & P 500 returns over the next decade will leave much to be desired, at least relative to those seen in the past 10 years.
On behalf of the New York Fed, let me welcome you all to this year’s U.S. Treasury Market Conference. Many thanks to the distinguished speakers and panelists for joining us here, and to the event organizers for putting together today’s outstanding agenda. I’m looking forward to a valuable and productive conversation.
This gathering is a recurring calendar item every fall. But the topics that we discuss each year do not stand alone. Think of it as leveling up in a video game—which is one of my favorite pastimes by the way, or dare I say, “present times”. At each conference, we advance our understanding of the Treasury market to the next level. And in the genre of gaming, this game is multiplayer. It’s remarkable to think about what we’ve accomplished in this decade-long enterprise of interagency collaboration. This work continues to be imperative, so we must keep playing. I mean that in the working sense, of course.
Before I keep going, I must give the standard Fed disclaimer that the views I express today are mine alone and do not necessarily reflect those of the Federal Open Market Committee (FOMC) or others in the Federal Reserve System.
Three Levels of Play
The remarks that I’ve given at past conferences have focused on taking stock of the Treasury market and sharing updates on our collective efforts.1 My comments today will be a retrospective into the events, developments, and lessons learned over the past seven years. I will then explain how all of that has shaped the FOMC’s thinking around monetary policy implementation and the design of our ample reserves implementation framework. I’ll also bring you up to speed with regard to where the Federal Reserve stands on its balance sheet strategy.
So, let’s return to the video game analogy and start at level one—the episode of volatility known as the “flash rally” of 2014. That period of market stress served as a sharp reminder that financial markets are not static: they evolve in response to changes in technology, regulation, business models, and with the addition of new players and participants.
That initial level made it clear that safeguards and systems must evolve so that these markets can continue to function well in every circumstance and under any condition. So, from there, we jumped to the next level. And that’s the imperative of market resiliency. We learned the importance of creating a system that can better withstand the unforeseeable and the unpredictable. Because when the unforeseeable and unpredictable did happen, as we saw in the “dash-for-cash” in 2020, it resulted in significant stresses in the Treasury market and related markets that threatened to spread to broader financial conditions.
This leads me to level three. A resilient financial system is critically important for monetary policy. Because monetary policy influences the economy by affecting financial market conditions, its effectiveness relies on well-functioning markets, with the Treasury market at the heart of it all.
Good news—we’ve unlocked the next level of my remarks. And that is an explanation of the FOMC’s approach to monetary policy implementation to support effective interest rate control and smooth functioning of these core markets.
Framing the Frameworks
We’ve established that monetary policy implementation frameworks are critically important to the conduct of monetary policy.2
In supplying reserves to the banking system, the Federal Reserve has multiple goals that frequently involve trade-offs.3 First and foremost, it targets a level of the policy interest rate and aims to minimize the variability of the policy rate around that target. In addition, it has objectives related to supporting financial stability and the smooth functioning of financial markets.
The core of any operational framework is the supply of reserves, which can range from a low level, or “scarce,” to “ample” and “abundant.” The “price” of reserves is the spread between the market interest rate and the rate earned for holding reserves at the central bank. When reserves are scarce, the slope of the demand curve for reserves is steep. A small change in the quantity of reserves results in a meaningful change in the spread. When reserves are ample, the demand curve flattens but still slopes downward, so that small changes in the quantity of reserves have modest effects on the spread. And when reserves are abundant, the demand curve is essentially flat.
A central bank has two sets of tools it can use to supply reserves. First, it chooses an ex ante aggregate level of reserves to supply to the banking system. Second, it may make available lending facilities to the banking system that offer loans to financial institutions at an interest rate determined by the central bank. If the ex ante supply of reserves is sufficiently low, the additional demand will be met by the lending facilities. Note that both tools are a means to supply reserves: In the first, the supply is set in advance, while with the latter, it adjusts endogenously to market conditions.
It is worth emphasizing that the two tools can be mutually reinforcing in achieving desired outcomes. For example, lending facilities limit upward movements in interest rates on days of high demand, thereby reducing the ex ante supply of reserves needed to control short-term rates.4
Federal Reserve: Ample Reserves and Tools
The Fed’s operational framework has evolved over time, reflecting its experience with large balance sheets since the global financial crisis.5 In January 2019, when the decline in the Fed’s asset holdings implied that the quantity of reserves would soon fall below an “abundant” level, the FOMC formally adopted an ample reserves strategy.6
The FOMC has defined this framework as one in which “control over the level of the federal funds rate and other short-term interest rates is exercised primarily through the setting of the Federal Reserve’s administered rates, and in which active management of the supply of reserves is not required.”7 Accordingly, the ex ante supply of reserves is chosen to be sufficiently large to meet the demand for reserves on most days.
One important tool the FOMC has established to ensure interest rate control is the overnight reverse repo facility (ON RRP), which, alongside the interest paid on reserve balances (IORB), helps set a floor for the federal funds rate. Through the ON RRP, eligible counterparties “lend” to the Federal Reserve at the rate set by the FOMC, currently at the bottom of the target range for the federal funds rate. Usage of the ON RRP adjusts automatically to market conditions, rising and falling with supply and demand, which is particularly important in a dynamic market.
The ON RRP has proven to be a very effective and flexible tool to support interest rate control to the downside. When Federal Reserve asset holdings push reserves above ample, the ON RRP relaxes the tight relationship between balance sheet size and reserves and acts as a safety valve in supporting smooth transmission of monetary policy to markets. As the size of the balance sheet falls, market rates rise above the rate offered at the ON RRP and, as a result, usage of the ON RRP declines to very low levels. The dynamic usage of the ONRRP is seen in Figure 1, which shows average monthly usage of the ON RRP from 2016 through October of this year. The ON RRP was used extensively when it was economically sensible for the Fed’s counterparties to do so. By contrast, it has very limited usage when repo rates are well above the ON RRP rate, as is the case today.
In 2021, the Federal Reserve introduced the Standing Repo Facility (SRF), which nicely complements the ON RRP by providing interest rate control to the upside.8 The SRF rate is set at the top of the FOMC’s target range for the federal funds rate. This combination of an ample supply of reserves and an SRF rate at the top of the target range reduces the day-to-day reliance on the facility except during periods of significant upward pressure on rates resulting from strong liquidity demand or market stress.
By ensuring that adequate liquidity will be available in a wide variety of circumstances, the SRF plays a critical role in capping temporary upward pressure on rates and assures markets of effective interest rate control and smooth market functioning. It is best thought of as a way of making sure that the overall market has adequate liquidity consistent with the FOMC’s desired level of interest rates. In that regard, it differs from other lending facilities—such as the discount window—that aim to provide individual banks with liquidity when the need arises.
The SRF has been effective as reserves have moved from abundant toward ample. Over the past two months, SRF usage has risen from essentially zero to having greater frequency and higher volume of take-up, especially on days of temporary repo market pressures, as shown in Figure 2. Like the ON RRP facility, the SRF’s effectiveness relies on market participants availing themselves of the SRF based on market conditions, free of worries about stigma or other impediments. I fully expect that the SRF will continue to be actively used in this way and contain upward pressures on money market rates.
Federal Reserve: The Way Forward
At the onset of the pandemic, the Fed, along with central banks around the world, responded quickly to restore market functioning,9 causing reserves to rise well above ample, as they did in many jurisdictions.
In June of 2022, the Fed began the process of reducing the size of its balance sheet to transition toward an ample level of reserves.10 The FOMC said it intended to stop balance sheet runoff when it deemed reserves were somewhat above ample, and then allow reserves to decline further as other liabilities, such as currency, grow.
The process has worked according to plan. The Fed’s securities holdings have shrunk from a peak of about $8-1/2 trillion in 2022 to $6-1/4 trillion today. At its meeting in October, the FOMC decided it would conclude the reduction of its aggregate securities holdings on December 1.11 This decision was based on clear market-based signs that we had met the test of reserves being somewhat above ample.12 In particular, repo rates have increased relative to administered rates and have exhibited more volatility on certain days. Accordingly, we have been seeing more frequent use of the SRF. And the effective federal funds rate has increased somewhat relative to the IORB after years of that spread being at a stable level. These developments were expected as the supply of reserves closed in on ample.13
Looking forward, the next step in our balance sheet strategy will be to assess when the level of reserves has reached ample. It will then be time to begin the process of gradual purchases of assets that will maintain an ample level of reserves as the Fed’s other liabilities grow and underlying demand for reserves increases over time. Such reserve management purchases will represent the natural next stage of the implementation of the FOMC’s ample reserves strategy and in no way represent a change in the underlying stance of monetary policy.
Determining when we are at ample reserves is an inexact science. I am closely monitoring a variety of market indicators related to the fed funds market, repo market, and payments to help assess the state of reserve demand conditions. Based on recent sustained repo market pressures and other growing signs of reserves moving from abundant to ample, I expect that it will not be long before we reach ample reserves.
Conclusion
With that, we’ve arrived at the endgame of my remarks. We’ve learned a lot over the past decade. The FOMC’s monetary policy implementation framework is designed to support an adequate supply of liquidity under a wide range of circumstances. The combination of an ample supply of reserves and the Standing Repo Facility enables the Committee to maintain strong interest rate control and flexibility regarding changes in the size of its balance sheet. This operational framework has proven to be highly effective—and continues to work as designed.